-
 万喜堂彩票APP
万喜堂彩票APP 功能丰富 实时交流
 万喜堂彩票手机站
万喜堂彩票手机站 移动端访问更便捷
 万喜堂彩票小程序
万喜堂彩票小程序 订阅获取更多服务
 万喜堂彩票官微
万喜堂彩票官微 关注获取更多资讯
 万喜堂彩票服务号
万喜堂彩票服务号 实时接收采购订单
万喜堂彩票APP 功能丰富 实时交流
万喜堂彩票手机站 移动端访问更便捷
万喜堂彩票小程序 订阅获取更多服务
万喜堂彩票官微 关注获取更多资讯
万喜堂彩票服务号 实时接收采购订单
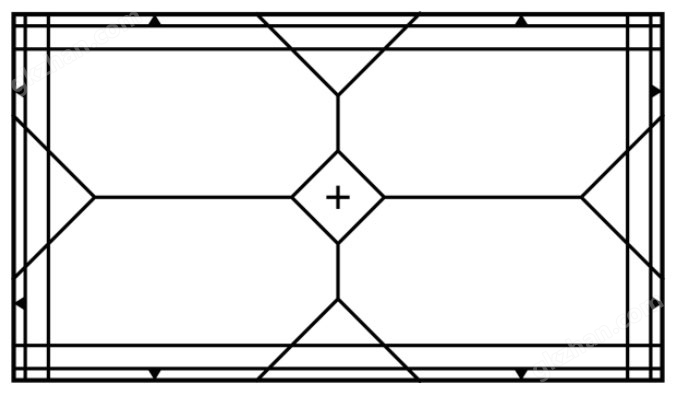
CCD传感器建成垂直行像素。这些垂直行将干扰通用型定位图的垂直线。TE122根据45°线路设计的目的就是为了防止这种干扰。
•定位测试单元由两个延迟部分,一个用于R / B,一个用于绿色的
•测试图TE122
•B/ W显示器
如果定位测试单元能够在水平方向上产生一个延迟或者提前给出一个绿色的 R/B值,水平和垂直方向的定位误差也是可以测量的。另外,不仅普通相机使用这种方式测量,组合透镜相机(透镜效应)也是这么测量的。
测量
两个延迟部分开关测量之前都在零位位置。各自调动 R、B绿色转向最小化a和b的距离(图1)。可以发现水平和垂直误差:

图 1:在图像中心的水平和垂直方向上,a和b判断定位误差。覆盖R-G。

如果误差是正的,需要矫正绿色延迟;如果错误是负的,需要矫正 R/B延迟。测量水平延迟误差在如图二上下位置,这里忽略可能出现在那边的垂直误差。现在R/B各自所在的位置对称的围绕绿色。
可能出现的错误调查:
1.只有水平误差,H1=H2
为了测量水平误差,移动(提前) H1的红色超过绿色
水平误差 =H1。
R / B延迟绿色:+
R / B前进绿色:-
2. 只有垂直误差, V=H1=H2
为了测量垂直误差 V 移位(提前)红色超过绿色。
垂直误差 V= 水平移位 H1 。
R/B 升高绿色: +
R/B 下降绿色: -
3. 水平和垂直误差
首先测量水平误差:移位(提前)红色使 H1=H2 。然后测量垂直误差 V 符合 2 :移位(提前)红色超过绿色;这这移动量就是垂直误差 V 。
4. 旋转 R/B 绿色
旋转 =(a+b)/2
R / B 逆时针转动绿色: +
R / B 顺时针转动绿色: -
5. 横向色差 = H1 + H2 (由于透镜 )
*您想获取产品的资料:
个人信息: