-
 万喜堂彩票APP
万喜堂彩票APP 功能丰富 实时交流
 万喜堂彩票手机站
万喜堂彩票手机站 移动端访问更便捷
 万喜堂彩票小程序
万喜堂彩票小程序 订阅获取更多服务
 万喜堂彩票官微
万喜堂彩票官微 关注获取更多资讯
 万喜堂彩票服务号
万喜堂彩票服务号 实时接收采购订单
万喜堂彩票APP 功能丰富 实时交流
万喜堂彩票手机站 移动端访问更便捷
万喜堂彩票小程序 订阅获取更多服务
万喜堂彩票官微 关注获取更多资讯
万喜堂彩票服务号 实时接收采购订单
深圳市泰科智能伺服技术有限公司专业研发、生产、销售精密机器人关节模组、高性能小型智能伺服驱动器与通用运动控制产品,也为客户提供OEM客户化产品与相关配套的有刷、无刷、直线、步进电机、编码器。经过几年的创业和发展,公司已初具规模,产品主要应用于国内机器人、半导体组装设备、工厂自动化设备、航天等数十个行业的数百家客户,并出口欧美等国。
研究开发:
我们专业研发生产高可靠性高质量机器人关节模组,高性能通用伺服驱动产品,帮助客户解决更具挑战性的运动控制问题与应用。
我们能为客户提供一个宽范围的产品:
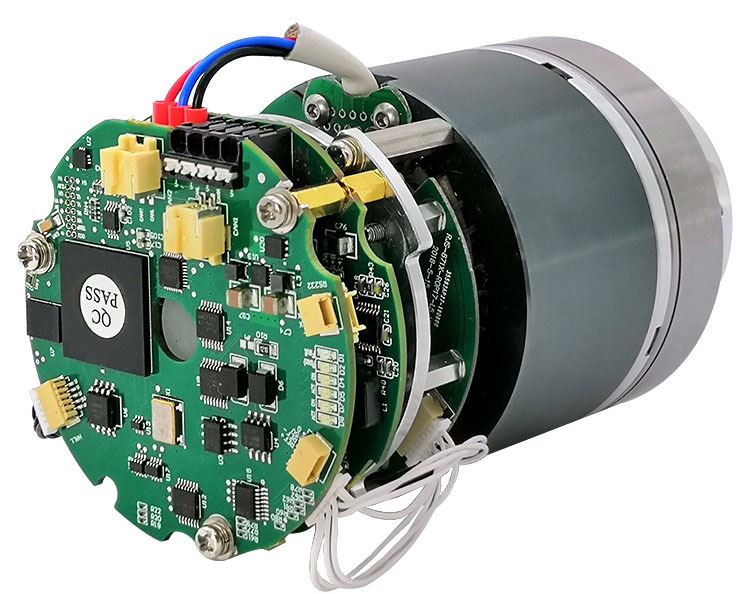
(1)RJS14-40协作机器人关节模组及组件
(2)12-320VDC直流输入数字伺服驱动器
(3)220VAC交流输入数字伺服驱动器
(4)RS232/485/CAN/CANopen/EtherCAT总线伺服驱动器
(5)模拟量伺服放大器
(6)步进伺服驱动器
产品应用:
| • 机器人 | • 半导体生产 |
| • 电子组装设备 | • 医疗设备及自动化配药系统 |
| • 自动化实验室 | • 纺织设备 |
| • 印刷设备 | • 包装设备 |
| • 数控机床 | • 木材加工设备 |
| • 打印机 | • 机械手 |
| • 自动化生产线 | • 材料处理 |
| • 航空航天 |
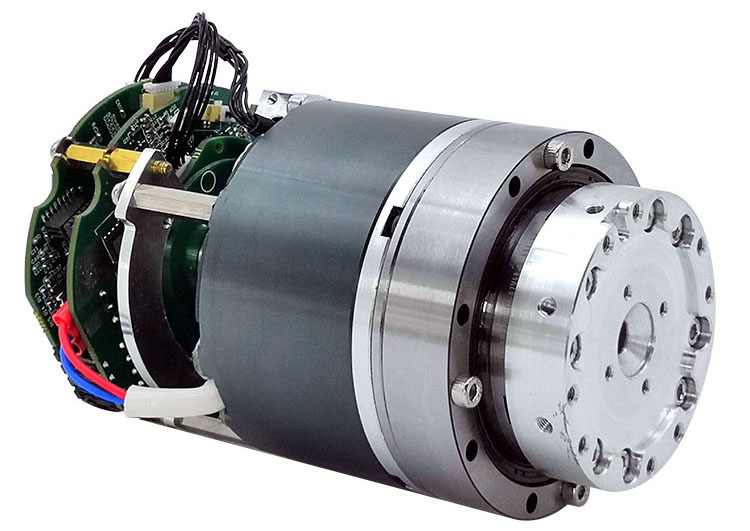
【主要特性】
无封装外壳
以满足客户自主设计机械臂外形的需求
更精准
采用双编码器实现全闭环控制,输出端重复定位精度可达0.001°
更轻巧
减速器采用中空超扁平设计,结构更紧凑,整机更小巧,关节自重更轻,重量<1.2Kg。
超大力矩
连续输出扭矩为10~450N.m。
应用范围广
自动化组装生产,自动化物流分拣,无人零售,康复医疗及手术辅助,电力巡检等
更安全
驱动器过流、过温、过压欠压、位置超差、短路、I2t、控制错误等全面的安全保护设计
更方便
常规为48VDC供电,24~60VDC之间供电可选
低功耗
RJU14正常工作小仅20W,3KG协作机器人普通工况下功耗约150W。
更友善
EtherCAT,CANopen通信可选,支持大部分主流机器人控制器
定制
为客户提供OEM定制化服务
【规格参数】
| 基本性能 | ||
| 参数 | 单位 | RJUZ14/RJU14 |
| 启停容许大转矩 | Nm | 34 |
| 平均负载转矩 | Nm | 13.5 |
| 静态负载转矩 | Nm | 21.2 |
| 大瞬时转矩 | Nm | 66 |
| 大许用弯矩 | Nm | 41 |
| 大瞬时弯矩 | Nm | 80 |
| 额定转速 | rpm | 29.7 |
| 大转速 | rpm | 47.5 |
| 电气性能 | ||
| 电机额定功率 | W | 118 |
| 电机额定电压 | VDC | 48 |
| 电机额定电流 | A | 4.2 |
| 峰值电流 | A | 10.5 |
| 通讯协议 | -- | EtherCAT/CANopen |
| 机械性能 | ||
| 关节重量 | kg | 1.14/1.47 |
| 关节直径 | mm | 70/76 |
| 关节长度 | mm | 107/117.5 |
| 抱闸 | -- | 插销式(UR类型) |
| 输出端编码器 | -- | 17位单圈值 |
| 电机编码器 | P/R | 20000 |
| 减速器速比 | -- | 101 |
*您想获取产品的资料:
个人信息:
























